设备功能:
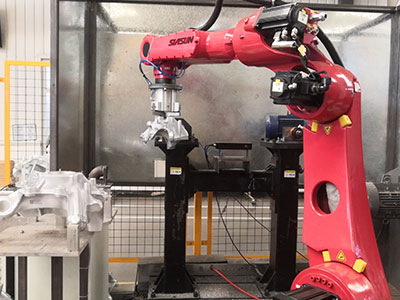
1. 采用80kg机器人抓件、铣刀加工方式,飞边去除干净无残留,代替人工;
2. 可应对工件变形导致的飞边不一致问题;
3. 免人工示教、离线编程效率高、操作简单;
4. 打磨后外观质量满足客户需要;
5. 打磨效率满足客户需要;
6. 打磨后产品合格率99%以上。
主要创新点:
1. 采用3D视觉扫描技术,解决飞边型线变形难题;
2. 完全自主设计的视觉软件,涵盖了相机一键标定、动作姿态仿真,任意飞边速度、残留高度可调、进退刀自动生成、多工具打磨自动切换等功能;
3. 离线视觉软件操作简单便捷,效率高。
1、工作空气压力:0.5-0.6MPa、电源三相五线制 AC220V、50HZ。
2、工作环境温度: 0~55℃;最大相对湿度: 95%。
3、总功率:约27kW。
4、识别方式:3D视觉识别。
5、单夹爪设计,根据具体工艺要求,单件工件节拍为20s--40s。
设备功能
本系统可以实现在保证安全的前提下全自动将差压机浇筑工件前,在浇口套位置安放过滤网,适用于锥形网使用,具备自动取料和放料功能。
设备特点
1、可一次携带多个过滤网,避免频繁大范围的取网动作,减少动作时间,提高工作效率、适配性,单个过滤网放网节拍≤3s 。
2、放网精度高±0.02,实测无放网偏现象发生 。
3、设备总功率:2.2kW。
3、用户自定义界面可实时对放网位置微调。
4、换型一键升起,避免干涉换型操作;安全一键回原点功能,此功能大大减少了现场工作人员的操作难度。
5、机器人柔性强,针对造型复杂模具实现安全、无障碍放网。
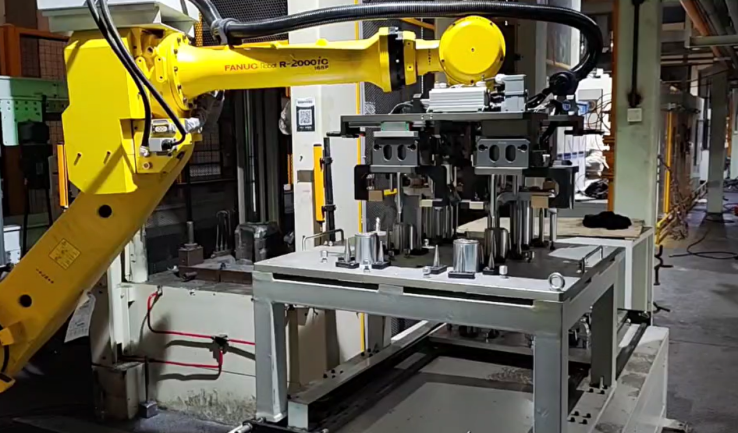
1、采用发那科6轴机器人进行转运。(R-2000IC/165F)
2、工件来料人工摆放指定姿态至上料工装,上料工装采用上下双层形式,交替式供料;私服控制,定位精度高,有效的保证工件上下料稳定性。
3、根据产品特性来制作相应的机器人夹爪,采用双夹爪设计,节省上下料节拍;夹指部分采用高硬度尼龙材质,有效避免工件表面磕碰,更换便捷。
4、加工完沾水清洗,循环水设计;吹扫风管采用柔性设计,吹扫部位可任意调整;吹扫时间可根据客户要求设定。
5、未来可完美结合前岛自动化,形成差压整体自动化。
6、节拍38s两件。

 冀公网安备 13030502000145号
冀公网安备 13030502000145号